mirror of
https://github.com/yakhyo/uniface.git
synced 2026-05-15 12:57:55 +00:00
279 lines
6.0 KiB
Markdown
279 lines
6.0 KiB
Markdown
# Gaze Estimation
|
|
|
|
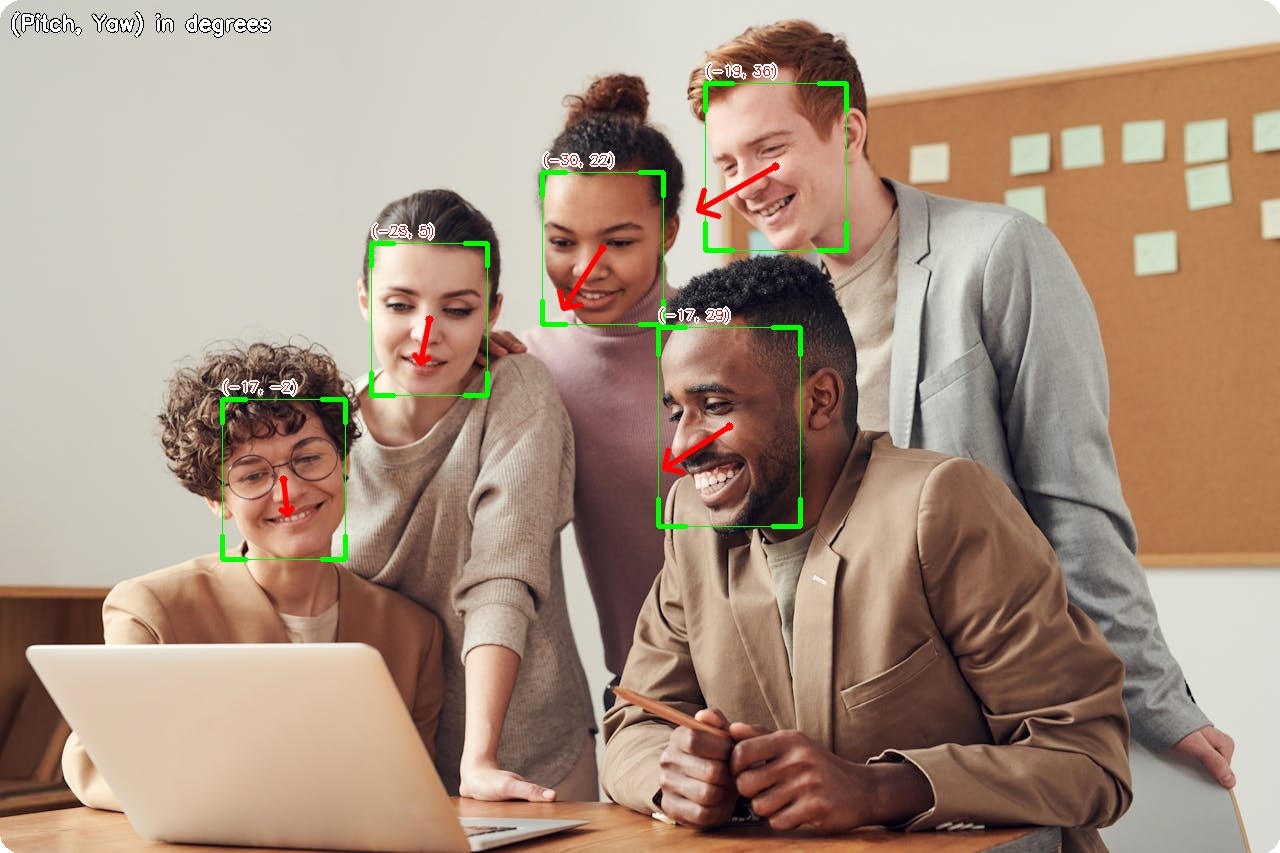
Gaze estimation predicts where a person is looking (pitch and yaw angles).
|
|
|
|
<figure markdown="span">
|
|
{ width="100%" }
|
|
<figcaption>Gaze direction arrows with pitch/yaw angle labels</figcaption>
|
|
</figure>
|
|
|
|
---
|
|
|
|
## Available Models
|
|
|
|
| Model | Backbone | Size | MAE* |
|
|
|-------|----------|------|------|
|
|
| ResNet18 | ResNet18 | 43 MB | 12.84° |
|
|
| **ResNet34** :material-check-circle: | ResNet34 | 82 MB | 11.33° |
|
|
| ResNet50 | ResNet50 | 91 MB | 11.34° |
|
|
| MobileNetV2 | MobileNetV2 | 9.6 MB | 13.07° |
|
|
| MobileOne-S0 | MobileOne | 4.8 MB | 12.58° |
|
|
|
|
*MAE = Mean Absolute Error on Gaze360 test set (lower is better)
|
|
|
|
---
|
|
|
|
## Basic Usage
|
|
|
|
```python
|
|
import cv2
|
|
import numpy as np
|
|
from uniface.detection import RetinaFace
|
|
from uniface.gaze import MobileGaze
|
|
|
|
detector = RetinaFace()
|
|
gaze_estimator = MobileGaze()
|
|
|
|
image = cv2.imread("photo.jpg")
|
|
faces = detector.detect(image)
|
|
|
|
for face in faces:
|
|
# Crop face
|
|
x1, y1, x2, y2 = map(int, face.bbox)
|
|
face_crop = image[y1:y2, x1:x2]
|
|
|
|
if face_crop.size > 0:
|
|
# Estimate gaze
|
|
result = gaze_estimator.estimate(face_crop)
|
|
|
|
# Convert to degrees
|
|
pitch_deg = np.degrees(result.pitch)
|
|
yaw_deg = np.degrees(result.yaw)
|
|
|
|
print(f"Pitch: {pitch_deg:.1f}°, Yaw: {yaw_deg:.1f}°")
|
|
```
|
|
|
|
---
|
|
|
|
## Model Variants
|
|
|
|
```python
|
|
from uniface.gaze import MobileGaze
|
|
from uniface.constants import GazeWeights
|
|
|
|
# Default (ResNet34, recommended)
|
|
gaze = MobileGaze()
|
|
|
|
# Lightweight for mobile/edge
|
|
gaze = MobileGaze(model_name=GazeWeights.MOBILEONE_S0)
|
|
|
|
# Higher accuracy
|
|
gaze = MobileGaze(model_name=GazeWeights.RESNET50)
|
|
```
|
|
|
|
---
|
|
|
|
## Output Format
|
|
|
|
```python
|
|
result = gaze_estimator.estimate(face_crop)
|
|
|
|
# GazeResult dataclass
|
|
result.pitch # Vertical angle in radians
|
|
result.yaw # Horizontal angle in radians
|
|
```
|
|
|
|
### Angle Convention
|
|
|
|
```
|
|
pitch = +90° (looking up)
|
|
│
|
|
│
|
|
yaw = -90° ────┼──── yaw = +90°
|
|
(looking left) │ (looking right)
|
|
│
|
|
pitch = -90° (looking down)
|
|
```
|
|
|
|
- **Pitch**: Vertical gaze angle
|
|
- Positive = looking up
|
|
- Negative = looking down
|
|
|
|
- **Yaw**: Horizontal gaze angle
|
|
- Positive = looking right
|
|
- Negative = looking left
|
|
|
|
---
|
|
|
|
## Visualization
|
|
|
|
```python
|
|
from uniface.draw import draw_gaze
|
|
|
|
# Detect faces
|
|
faces = detector.detect(image)
|
|
|
|
for face in faces:
|
|
x1, y1, x2, y2 = map(int, face.bbox)
|
|
face_crop = image[y1:y2, x1:x2]
|
|
|
|
if face_crop.size > 0:
|
|
result = gaze_estimator.estimate(face_crop)
|
|
|
|
# Draw gaze arrow on image
|
|
draw_gaze(image, face.bbox, result.pitch, result.yaw)
|
|
|
|
cv2.imwrite("gaze_output.jpg", image)
|
|
```
|
|
|
|
### Custom Visualization
|
|
|
|
```python
|
|
import cv2
|
|
import numpy as np
|
|
|
|
def draw_gaze_custom(image, bbox, pitch, yaw, length=100, color=(0, 255, 0)):
|
|
"""Draw custom gaze arrow."""
|
|
x1, y1, x2, y2 = map(int, bbox)
|
|
|
|
# Face center
|
|
cx = (x1 + x2) // 2
|
|
cy = (y1 + y2) // 2
|
|
|
|
# Calculate endpoint
|
|
dx = -length * np.sin(yaw) * np.cos(pitch)
|
|
dy = -length * np.sin(pitch)
|
|
|
|
# Draw arrow
|
|
end_x = int(cx + dx)
|
|
end_y = int(cy + dy)
|
|
|
|
cv2.arrowedLine(image, (cx, cy), (end_x, end_y), color, 2, tipLength=0.3)
|
|
|
|
return image
|
|
```
|
|
|
|
---
|
|
|
|
## Real-Time Gaze Tracking
|
|
|
|
```python
|
|
import cv2
|
|
import numpy as np
|
|
from uniface.detection import RetinaFace
|
|
from uniface.gaze import MobileGaze
|
|
from uniface.draw import draw_gaze
|
|
|
|
detector = RetinaFace()
|
|
gaze_estimator = MobileGaze()
|
|
|
|
cap = cv2.VideoCapture(0)
|
|
|
|
while True:
|
|
ret, frame = cap.read()
|
|
if not ret:
|
|
break
|
|
|
|
faces = detector.detect(frame)
|
|
|
|
for face in faces:
|
|
x1, y1, x2, y2 = map(int, face.bbox)
|
|
face_crop = frame[y1:y2, x1:x2]
|
|
|
|
if face_crop.size > 0:
|
|
result = gaze_estimator.estimate(face_crop)
|
|
|
|
# Draw bounding box
|
|
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
|
|
|
|
# Draw gaze
|
|
draw_gaze(frame, face.bbox, result.pitch, result.yaw)
|
|
|
|
# Display angles
|
|
pitch_deg = np.degrees(result.pitch)
|
|
yaw_deg = np.degrees(result.yaw)
|
|
label = f"P:{pitch_deg:.0f} Y:{yaw_deg:.0f}"
|
|
cv2.putText(frame, label, (x1, y1 - 10),
|
|
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
|
|
|
|
cv2.imshow("Gaze Estimation", frame)
|
|
|
|
if cv2.waitKey(1) & 0xFF == ord('q'):
|
|
break
|
|
|
|
cap.release()
|
|
cv2.destroyAllWindows()
|
|
```
|
|
|
|
---
|
|
|
|
## Use Cases
|
|
|
|
### Attention Detection
|
|
|
|
```python
|
|
def is_looking_at_camera(result, threshold=15):
|
|
"""Check if person is looking at camera."""
|
|
pitch_deg = abs(np.degrees(result.pitch))
|
|
yaw_deg = abs(np.degrees(result.yaw))
|
|
|
|
return pitch_deg < threshold and yaw_deg < threshold
|
|
|
|
# Usage
|
|
result = gaze_estimator.estimate(face_crop)
|
|
if is_looking_at_camera(result):
|
|
print("Looking at camera")
|
|
else:
|
|
print("Looking away")
|
|
```
|
|
|
|
### Gaze Direction Classification
|
|
|
|
```python
|
|
def classify_gaze_direction(result, threshold=20):
|
|
"""Classify gaze into directions."""
|
|
pitch_deg = np.degrees(result.pitch)
|
|
yaw_deg = np.degrees(result.yaw)
|
|
|
|
directions = []
|
|
|
|
if pitch_deg > threshold:
|
|
directions.append("up")
|
|
elif pitch_deg < -threshold:
|
|
directions.append("down")
|
|
|
|
if yaw_deg > threshold:
|
|
directions.append("right")
|
|
elif yaw_deg < -threshold:
|
|
directions.append("left")
|
|
|
|
if not directions:
|
|
return "center"
|
|
|
|
return " ".join(directions)
|
|
|
|
# Usage
|
|
result = gaze_estimator.estimate(face_crop)
|
|
direction = classify_gaze_direction(result)
|
|
print(f"Looking: {direction}")
|
|
```
|
|
|
|
---
|
|
|
|
## Factory Function
|
|
|
|
```python
|
|
from uniface.gaze import create_gaze_estimator
|
|
|
|
gaze = create_gaze_estimator() # Returns MobileGaze
|
|
```
|
|
|
|
---
|
|
|
|
## Next Steps
|
|
|
|
- [Head Pose Estimation](headpose.md) - 3D head orientation
|
|
- [Anti-Spoofing](spoofing.md) - Face liveness detection
|
|
- [Privacy](privacy.md) - Face anonymization
|
|
- [Video Recipe](../recipes/video-webcam.md) - Real-time processing
|